![]()
![]()
|
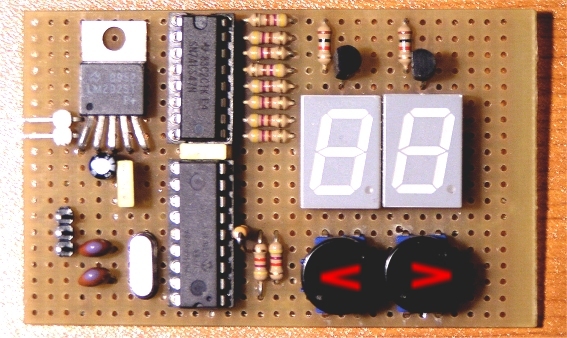
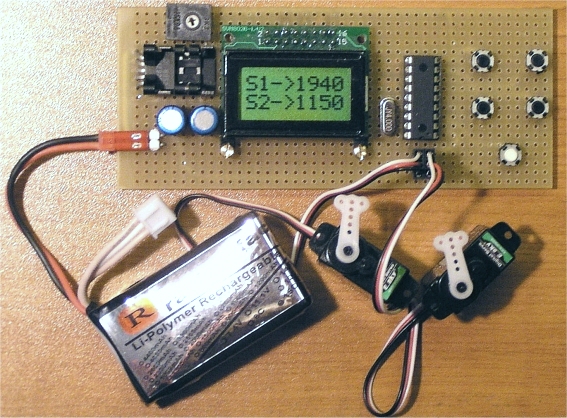
Pri sestavljanju robotov in nato pri
programiranju rabimo nekakšen dajalnik impulsov od 1 do 2 mS, tako da lahko brez programa
v mikrokontrolerju vidimo položaj posameznega serva. Takih testerjev imam jih sicer kar
nekaj narejenih z integrirci in potenciometrom, vendar je tu večni problem odčitati
dolžino impulsa in jo nato vpisati v program robota. Zato sem se odločil narediti
takšen tester s PIC mikrokontrolerjem in LED indikatorjem dolžine impulsa, tako da lahko
odčitam vrednost in vpišem v program. Napravljen je na eksperimentalni ploščici, kar
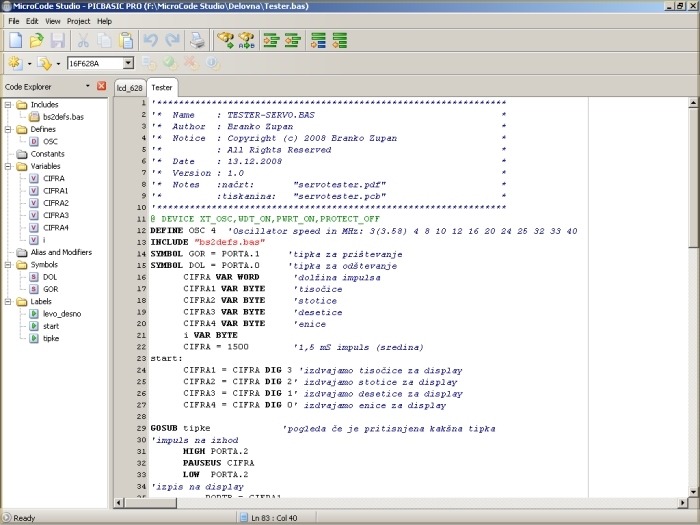
mi je bilo najhitreje, saj ne vsebuje dosti elementov. Program je napisan v Basicu s pomočjo programa MicroCode Studio. Na 7 segmentnem displayu je prikazana širina impulsa v milisekundah. |
Program v Basicu |
|
 |
||||||||||
Servotester z LCD prikazovalnikom |
||||||||||
|
||||||||||
![]()