|

mi služi za preizkušanje vseh mogočih vezij in programov.
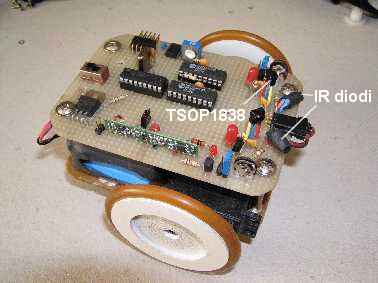 Zato je za zgornjo plošči uporabljeno naluknjano tiskano
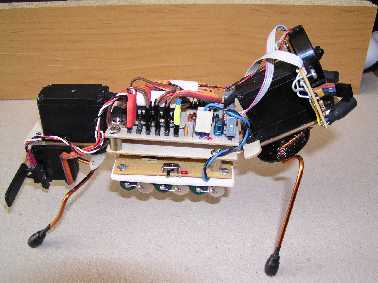
vezje z luknjicami v rasteru 2.54 mm. Trenutno je na njej PIC16F84, oscilator
za 36 kHz ( z 555 ), IR senzorji TSOP 1836 in sprejemnik za 433 MHz. Robot se
samostojno izogiba oviram, z oddajnikom pa ga lahko daljinsko krmilim. Program v
procesorju je napisan tako da imajo senzorji prioriteto in sem s tem preprečil
zaletavanje v oviro. Robot potuje po prostoru čisto samostojno, vendar ga je mogoče v
katerem koli trenutku z oddajnikom usmerjati. Napajan je iz 12 V akumulatorja, zato sem
vgradil tudi stabilizator z 7805. Servomotorja, ki poganjata voziček, sta prirejena za
kontinuirano vrtenje. O preureditvi servomotorjev bo napisano na drugem mestu. Program v
mikroprocesorju je napisan s PIC Basic - om in izgleda tako in Assemblrer tako. Zato je za zgornjo plošči uporabljeno naluknjano tiskano
vezje z luknjicami v rasteru 2.54 mm. Trenutno je na njej PIC16F84, oscilator
za 36 kHz ( z 555 ), IR senzorji TSOP 1836 in sprejemnik za 433 MHz. Robot se
samostojno izogiba oviram, z oddajnikom pa ga lahko daljinsko krmilim. Program v
procesorju je napisan tako da imajo senzorji prioriteto in sem s tem preprečil
zaletavanje v oviro. Robot potuje po prostoru čisto samostojno, vendar ga je mogoče v
katerem koli trenutku z oddajnikom usmerjati. Napajan je iz 12 V akumulatorja, zato sem
vgradil tudi stabilizator z 7805. Servomotorja, ki poganjata voziček, sta prirejena za
kontinuirano vrtenje. O preureditvi servomotorjev bo napisano na drugem mestu. Program v
mikroprocesorju je napisan s PIC Basic - om in izgleda tako in Assemblrer tako.
|
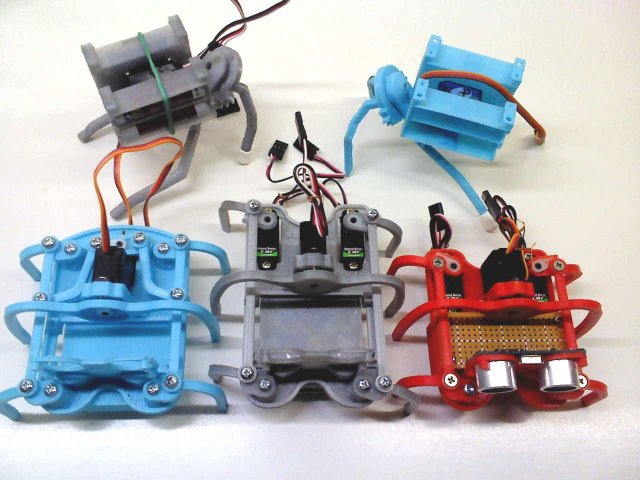
 BigFoot je malo večji
robot, ki se premika na dveh nogah. Krmiljen je z mikrokontrolerjem PIC16F84. Ima vgrajene IR senzorje TSOP
1836 za izogibanje ovir. Na nogah (stopalih) pa ima mikrostikali za slučaj če je ovira
prenizka in je IR senzorji ne zaznajo. Za napajanje ima akumulatorje 7,2 V 700 mAh in
stabilizator 7805. Akumulatorji se polnijo z vgrajenim polnilcem, ki ima omejilec toka in
izklopilec pri napolnjenih akumulatorjih. Polnilec meri z NTC upori temperaturo okolja in
akumulatorjev, tako da izklopi polnjenje ko se dvigne temperatura akumulatorjev za
približno 20 °C. V robotu sta vgrajena dva servomehanizma. Prvi je uporabljen za
prestopanje iz noge na nogo (nagibanje), drugi pa za korakanje. Oba servomehanizma sta
takšna kot jih uporabljamo v modelarstvu brez preurejanja. Listing Pic Basic programa v
BigFoot-u je tukaj, a program v assemblerju
je tukaj. BigFoot je malo večji
robot, ki se premika na dveh nogah. Krmiljen je z mikrokontrolerjem PIC16F84. Ima vgrajene IR senzorje TSOP
1836 za izogibanje ovir. Na nogah (stopalih) pa ima mikrostikali za slučaj če je ovira
prenizka in je IR senzorji ne zaznajo. Za napajanje ima akumulatorje 7,2 V 700 mAh in
stabilizator 7805. Akumulatorji se polnijo z vgrajenim polnilcem, ki ima omejilec toka in
izklopilec pri napolnjenih akumulatorjih. Polnilec meri z NTC upori temperaturo okolja in
akumulatorjev, tako da izklopi polnjenje ko se dvigne temperatura akumulatorjev za
približno 20 °C. V robotu sta vgrajena dva servomehanizma. Prvi je uporabljen za
prestopanje iz noge na nogo (nagibanje), drugi pa za korakanje. Oba servomehanizma sta
takšna kot jih uporabljamo v modelarstvu brez preurejanja. Listing Pic Basic programa v
BigFoot-u je tukaj, a program v assemblerju
je tukaj.
  
Nekaj korakov robota. (YouTube)
|
Podoben robot, ki ga je izdelal Češki kolega Dalibor Štědronský. Robot je zelo lepe kovinske
konstrukcije.Všeč mi je da je nekdo dobil idejo na moji internetni strani in jo tudi
izpeljal. Čestitke Daliborju! Naredil je še drugi robot, ki ga je imenoval Spider. Spider ima na sebi malo kamero, ki s
pomočjo BlueTooth povezave prenaša sliko na računalnik.
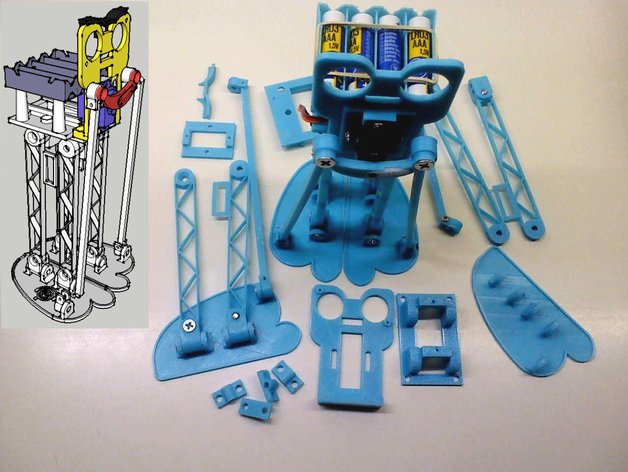
K hiši je prišel nov pripomoček - 3D printer.
S to pridobitvijo je izdelava robotov dosti lažja. Na sliki je BigFoot skiciran z
brezplačnim programom SketchUp.
Na spodnji sliki je nekaj delov robota sprintanih na doma narejenem 3D
printerju Troublemaker.
- Narisal in sprintal sem še nekaj različnih robotov, ki jih bom objavil in
opisal kasneje.
-
 -
|

 Poganjajo ga trije servomehanizmi. Prvi premika srednji nogi gor
in dol, druga dva pa levi in desni prednji in zadnji nogi. S tem sem dosegel da se robot
lahko obrača na mestu, v hoji naprej in nazaj. V spredjo zeleno škatljo (glava) bo
vgrajena kompletna elektronika za IR senzorje skupaj senzorji. Na hrbtu so vgrajeni
akumulatorji iz starega Ericsona GA628, v katere sem dodal še dva akumulatorja tako da je
sedaj vse skupaj 7,2 V. Vsi servomehanizmi so takšni kot jih uporabljamo v modelarstvu
brez preurejanja. Izziv pri tem robotu je program, saj ima robot velike možnosti gibanja
in izogibanja oviram. Krmiljen je tudi kot ostali roboti z mikrokontrolerjem PIC16F84. V glavo sem vgradil oscilator
z 555 za 36 kHz, IR diode in IR senzorje TSOP 1836. Poganjajo ga trije servomehanizmi. Prvi premika srednji nogi gor
in dol, druga dva pa levi in desni prednji in zadnji nogi. S tem sem dosegel da se robot
lahko obrača na mestu, v hoji naprej in nazaj. V spredjo zeleno škatljo (glava) bo
vgrajena kompletna elektronika za IR senzorje skupaj senzorji. Na hrbtu so vgrajeni
akumulatorji iz starega Ericsona GA628, v katere sem dodal še dva akumulatorja tako da je
sedaj vse skupaj 7,2 V. Vsi servomehanizmi so takšni kot jih uporabljamo v modelarstvu
brez preurejanja. Izziv pri tem robotu je program, saj ima robot velike možnosti gibanja
in izogibanja oviram. Krmiljen je tudi kot ostali roboti z mikrokontrolerjem PIC16F84. V glavo sem vgradil oscilator
z 555 za 36 kHz, IR diode in IR senzorje TSOP 1836.
|
 ... ...
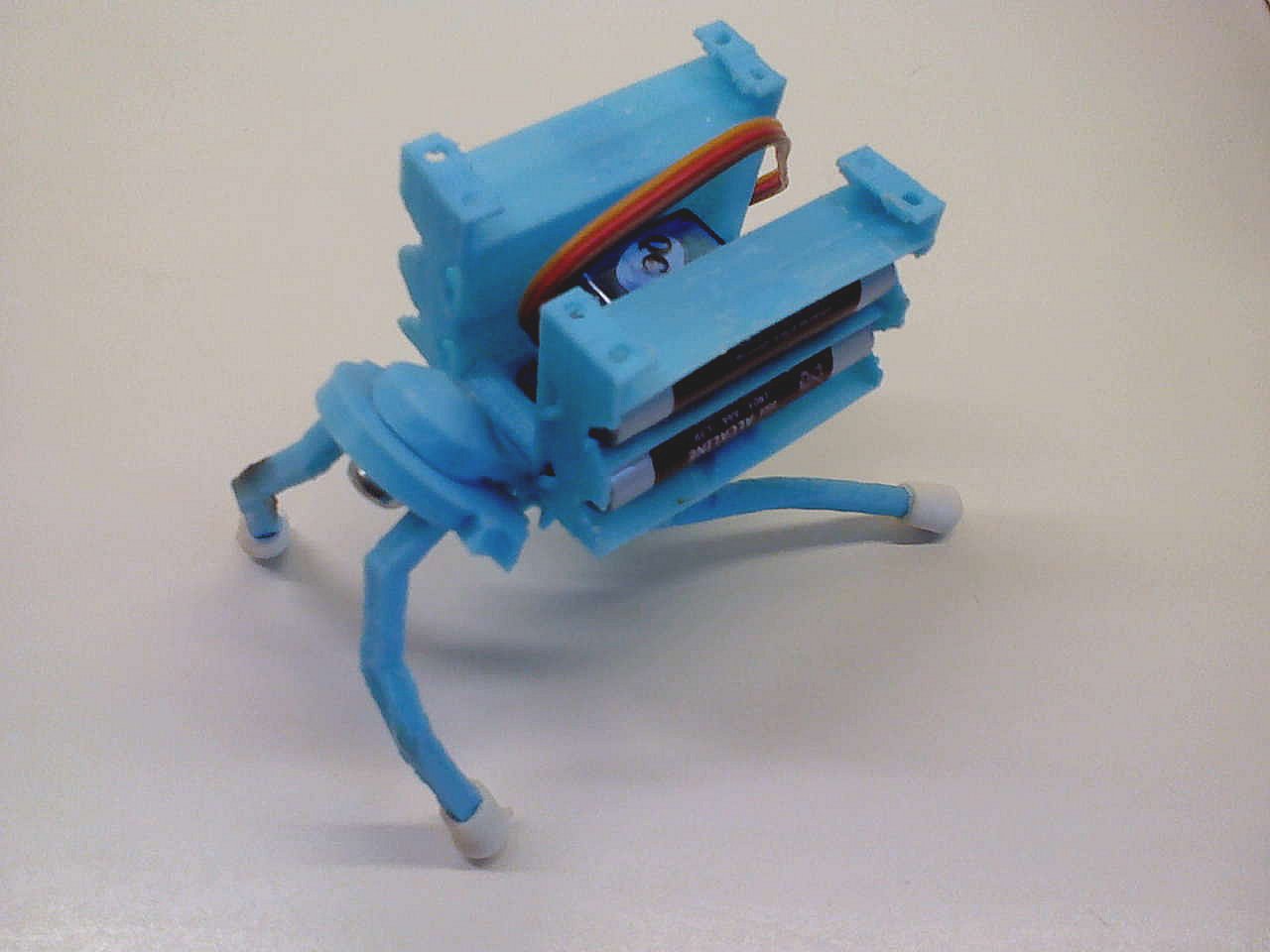
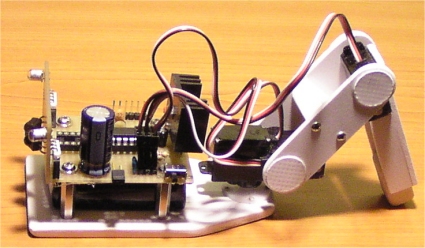
V aprilski (412) številki revije Elektor je bil objavljen članek o štirinožnem robotu (avtor ga je
imenoval Kobacajoči robot) podobnemu moji Bibi, vendar krmiljen z Atmelovim
mikroprocesorjem AT90S2313-10PI. Avtor je namesto IR senzorjev uporabil dve mikrostikali,
na kateri je pritrdil žične tipalke.Ker je v članku zanimiv opis izogibanja oviram in
način hoje sem se odločil robota narediti. Na Elektorjevi internetni strani je objavljen
tudi program napisan z Bascom programom in že kompilirana HEX datoteka. Torej je treba
samo še najti nek preprost programator. Malo iskanja mi je prineslo dva preprosta programatorja, eden za paralelna in drugi za serijska vrata. Oba
sta zelo preprosta in uporabljata brezplačen program italijanskega avtorja PonyProg2000. Tudi brezplačna demo
verzija BASCOM-AVR popolnoma zadostuje za obdelavo
programa v robotu.
Program je napisan tako, da čim ena od tipalk zazna oviro, preskoči iz
glavne zanke v podprogram za nazaj. V tem podprogramu dodatno aktivira rutino Step1, v
sklopu katere je dodatno aktivirana variabla Sense, ki povzroči obratno štetje števca.
Robot gre nazaj in obenem dela krog v odvisnosti od tega katera tipalka je zaznala oviro.
S tem je preprečeno ponovno zaletavanje v oviro ko robot nadaljuje pot naprej. Za krog je
pomembna variabla Direction (1 za desno, 2 za levo), ki povzroči dodatni zamik med
položaji servomehanizmov.
-
|

 |
V naravi najdemo gosenice, ki se premikajo na poseben način.
Takšna gosenica me je navdihnila na izdelavo tega robota, ki se podobno premika. Naletel
sem tudi na internetno stran francoskega avtorja, kjer je opisan prav takšen robot.
GEOMETRIDAE LARVAE: iz grščine "geo" (zemlja) +
"metron" (meriti) "larvae" (ličinka); se nanaša na ličinke ki
se premikajo kakor da bi merile dolžine, zato sem tega robotka tako imenoval.
-
|
 |
Robot je krmiljen s PIC16F628A in ima tudi dva senzorja za
odkrivanje ovir. Ta senzorja sta enaka kakor pri prejšnjih robotih, saj sem ugotovil da
delajo popolnoma zadovoljivo. Poganja ga Li-Po baterija 7,4 V, kar zadostuje za več kot
tri ure delovanja. Uporabil sem servomehanizme firme Esky EK2-0508, narejene za mini
helikopterje, ki se jih da dobiti zelo poceni iz Hongkonga kot rezervni deli za te
helikopterje. |
Nekaj več videoposnetkov  |
|
-
|
Tester
za servomehanizme |