![]()
Ultrazvok je mehansko nihanje elastičnega sredstva, je
longitudinalno valovanje. Njegovo frekvenčno območje se razprostira nad mejo človeškega sluha, to je nad 20 kHz. Zgornja meja frekvence je dana s tehnično zmogljivostjo proizvajanja hitrih mehanskih nihanj. Tako hitra mehanska nihanja ne morejo prodreti do slišnega centra možganov in jih zato ne moremo slišati, pač pa jih občutimo kot posebno bolečino, glavobol.Ultrazvok zaznavajo in oddajajo nekatere živali. Slišijo ga psi, mačke in še marsikatera žival. Netopirji se orientirajo in lovijo plen z ultrazvokom podobno kot z radarjem. Ultrazvok, ki ga oddajajo ima frekvenco od 20 do 60 kHz. Na istem principu deluje ultrazvočni senzor ki ga bom opisal.

Nekaj različnih ultrazvočnih senzorjev
Ultrazvočno merjenje razdalje se izvaja s pošiljanjem impulzov visoke zvočne frekvence. Te impulze sprejme ultrazvočni sprejemnik. Iz časa od trenutka oddaje do sprejema izračunamo razdaljo. |
|
 |
 |
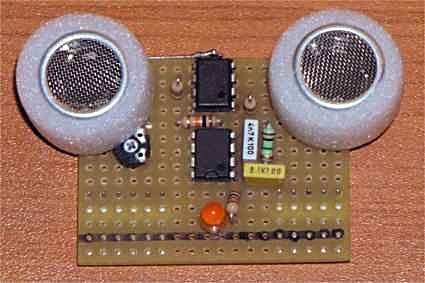
Sprejemnik lahko naredimo s tremi operacijskimi ojačevalniki. Spodaj je shema takšnega sprejemnika, ki sem ga preizkusil. |
|
 |
|
Oddajni del lahko naredimo z integrircem 555 ali pa ga direktno krmilimo z mikrokontrolerjem. |
|
  |
|
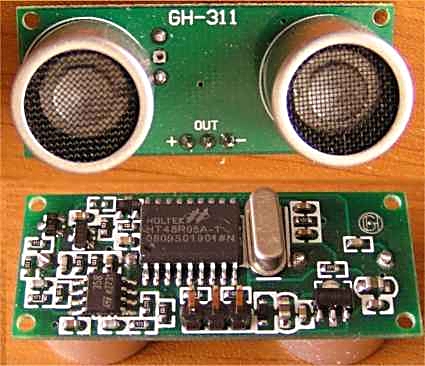
Levo je slika doma narejenega sprejemnika, desno pa kompletni UZ senzor kitajskega proizvajalca Sure electronic. Na tiskanini je Holtekov MCU. Način uporabe je opisan na njihovi strani in v mnogih projektih po spletu, zato tukaj ne bom o tem pisal. |
|
UZ senzor HC-SR04
Ultrazvočni senzor HC-SR04 se malce razlikuje od zgornjih dveh. Najvažnejše je: dobi se ga zelo poceni. Ima štiri priključke, vsakega posebej za proženje in odčitek, ter dva za napajanje.
|
 |
||||
| Pogled na tiskanino s spodnje strani nam razkrije da so avtorji obrisali oznake na integrircih z namenom zaščititi vsebino in shemo. Vsaj eden od čipov je serije 74xx in mora biti tudi kak mikrokontroler. Sicer pa takšni ultrazvočni senzorji delujejo vsi po istem (zgoraj opisanem) principu in pri tako nizki ceni HC-SR04 nima niti smisla razmišljati o samogradnji. Meni je senzor uporabnejši od prej opisanega, kljub temu da rabimo za uporabo dva vhoda na kontrolerju. S kontroliranim proženjem in odčitavanjem senzorja lahko uporabimo več senzorjev v istem prostoru brez strahu da bi se medsebojno motili. | |||||
Za ogled rezultatov in eksperimentiranje sem si napisal majhen terminal v Visual Basicu. Z njim lahko izpisujem rezultate iz mikrokontrolerja na računalniku. Napisan je za sicer Basic Stamp s katerim sem tudi naredil prve poskuse merjenja razdalje, vendar dela tudi z drugimi mikrokontrolerji.
Naslednji korak je priključitev na PIC16F628A in LCD. Uporabil sem kar vezje servotesterja z LCD prikazovalnikom, saj je programskega prostora več kot dovolj za oba programa in še kaj drugega.